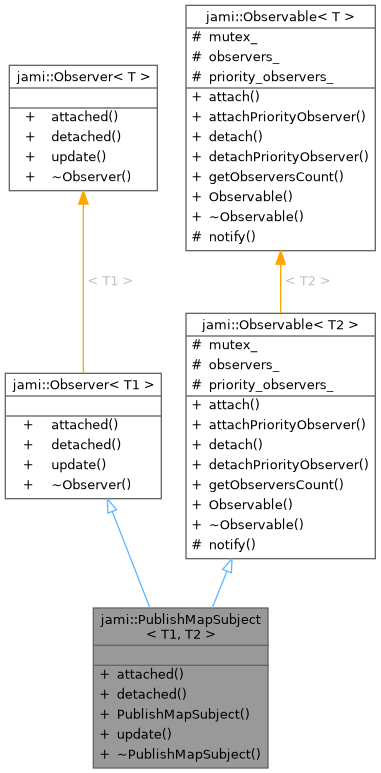
#include <observer.h>
Public Types | |
| using | F = std::function< T2(const T1 &)> |
Public Member Functions | |
| virtual void | attached (Observable< T1 > *srcObs) override |
| attached Here we just make sure that the PublishMapSubject is only attached to one Observable at a time. | |
| virtual void | detached (Observable< T1 > *) override |
| detached Since a MapSubject is only attached to one Observable, when detached We should detach all of it observers | |
| PublishMapSubject (F f) | |
| void | update (Observable< T1 > *, const T1 &t) override |
| ~PublishMapSubject () | |
| ~PublishMapSubject() Detach all observers to avoid making them call this observable when destroyed | |
 Public Member Functions inherited from jami::Observer< T1 > Public Member Functions inherited from jami::Observer< T1 > | |
| virtual | ~Observer () |
| Public Member Functions inherited from jami::Observable< T2 > | |
| bool | attach (Observer< T2 > *o) |
| void | attachPriorityObserver (std::shared_ptr< Observer< T2 > > o) |
| bool | detach (Observer< T2 > *o) |
| void | detachPriorityObserver (Observer< T2 > *o) |
| size_t | getObserversCount () |
| Observable () | |
| virtual | ~Observable () |
| ~Observable Detach all observers to avoid making them call this observable when destroyed | |
Additional Inherited Members | |
| Protected Member Functions inherited from jami::Observable< T2 > | |
| void | notify (T2 data) |
| Protected Attributes inherited from jami::Observable< T2 > | |
| std::mutex | mutex_ |
| std::set< Observer< T2 > * > | observers_ |
| std::list< std::weak_ptr< Observer< T2 > > > | priority_observers_ |
Detailed Description
Definition at line 186 of file observer.h.
Member Typedef Documentation
◆ F
Definition at line 189 of file observer.h.
Constructor & Destructor Documentation
◆ PublishMapSubject()
|
inline |
Definition at line 191 of file observer.h.
◆ ~PublishMapSubject()
|
inline |
~PublishMapSubject() Detach all observers to avoid making them call this observable when destroyed
Definition at line 233 of file observer.h.
References jami::PublishMapSubject< T1, T2 >::detached().

Member Function Documentation
◆ attached()
|
inlineoverridevirtual |
attached Here we just make sure that the PublishMapSubject is only attached to one Observable at a time.
- Parameters
-
srcObs
Reimplemented from jami::Observer< T1 >.
Definition at line 203 of file observer.h.
References jami::Observable< T >::detach(), and jami::emitSignal().

◆ detached()
|
inlineoverridevirtual |
detached Since a MapSubject is only attached to one Observable, when detached We should detach all of it observers
Reimplemented from jami::Observer< T1 >.
Definition at line 216 of file observer.h.
References jami::emitSignal(), jami::Observable< T2 >::mutex_, jami::Observable< T2 >::observers_, and jami::Observable< T2 >::priority_observers_.
Referenced by jami::PublishMapSubject< T1, T2 >::~PublishMapSubject().

◆ update()
|
inlineoverridevirtual |
Implements jami::Observer< T1 >.
Definition at line 195 of file observer.h.
References jami::Observable< T2 >::notify().

The documentation for this class was generated from the following file: